




 ||Message]
||Message]
1. Recall Prerequisites and Discuss
- Newton's laws are applicable only in inertial frames. For many purposes a frame fixed in the earth is an inertial frame.
- We can represent a vector \(\vec{A}=(a_1,a_2,a_3)\) geometrically as an arrow from the origin to the point at position \((a_1,a_2,a_3)\). If we rotate vectors about an axis then the length of vectors and the angle between two vectors does not change. This means \(|\vec{A}|. \vec{A}\cdot\vec{B} \) remain unchanged. Also vectors parallel to the axis of rotation remain invariant. More generally, component of every vector along the axis of rotation does not change. If \(\hat{n}\) is unit vector along the axis of rotation then \(\hat{n}\cdot\vec{A}\) remains under rotation.
- \( \vec{a}\times(\vec{b}\times\vec{c})= \vec{b}(\vec{a}\times\vec{c})- \vec{c}(\vec{a}\times\vec{b})\)
- Every nonzero vector \(\vec{a}\) can be written as \(\vec{a}=|a|\hat{a}\), where \(\hat{a}\) is unit vector along the given vector \(\vec{a}\). In other words, every vector \(\vec{a}\) is equal to unit vector along \(\vec{a}\) multiplied with its length.
A Geometrical Proof
Let \(\vec{A}=(A_1,A_2,A_3)\) and \(\vec{A}'=(A_1',A_2',A_3')\) denote a vector and rotated vector. You can easily derive the result for relation \begin{equation}\label{EQ01} \vec{A}^{'} = \vec{A} - (\hat{n}\times\vec{A})\, \sin\theta+ \hat{n}\times (\hat{n}\times\vec{A})\, (1-\cos\theta) \end{equation} by geometrical arguments. Some steps are outlined below. In the figure below $OX$ represents the axis of rotation. Under a clockwise rotation the point $P$ moves on arc of a circle, lying in the plane perpendicular to the axis of rotation, and goes to a point $Q$. The centre of the circle, $N$, lies on the axis of rotation. Thus the vector $\overrightarrow{OP}$ moves to the vector $\overrightarrow{OQ}$. The angle of rotation $\theta$ is the angle $\angle PNQ$. Thus rotation of the vector $\overrightarrow{OP}$ about the axis $OX$ gives vector $\overrightarrow{OQ}$, and the difference between the two vectors is $\overrightarrow{PQ}$.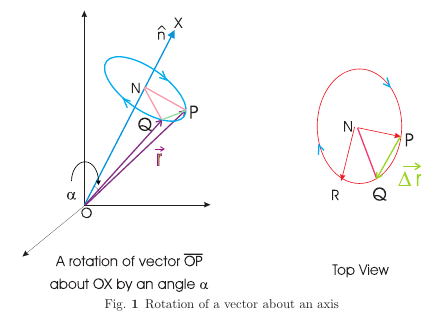 Rotation of a vector about an axis
Rotation of a vector about an axis
The following steps will now lead to another proof of the result \EqRef{EQ01}.
- Draw a radius $NR$ perpendicular to $NP$ as shown in the top view diagram. Let $\hat{\ell}, \hat{m}$ denote unit vectors along $NR$ and $NP$ respectively.
- Verify the facts \begin{eqnarray} \vec{r} &=& \overrightarrow{ON}+\overrightarrow{NP}.\\ \vec{r}^{'} &=& \overrightarrow{ON}+\overrightarrow{NQ}, \label{EQ03}\\ &=& \overrightarrow{ON}+\overrightarrow{NP} + \overrightarrow{PQ}. \end{eqnarray}
- In view of the fact that \(\hat{n}\) is a vector along \(\overrightarrow{ON}\), we get \begin{eqnarray} \hat{n}\times \vec{r}&=& \hat{n}\times \overrightarrow{NP},\\ \hat{n}\times \vec{r}^{'}&=& \hat{n}\times \overrightarrow{NQ}. \end{eqnarray}
We can resolve the vector $\overrightarrow{NQ}$ along two perpendicular directions $NP$ and $NR$. Let \(\hat{\ell}\) denote unit vector along $\overrightarrow{NR}$ and \(\hat{m}\) be a unit vector along \(\overrightarrow{NP}\). \begin{eqnarray} \hat{\ell}&=& \frac{\overrightarrow{NR}}{NR}, \qquad \overrightarrow{NR}=(NR) \hat{\ell}.\\ \hat{m} &=& \frac{\overrightarrow{NP}}{NP}, \qquad \overrightarrow{NP} = (NP) \hat{m}. \end{eqnarray} Then the three unit vectors \(\hat{\ell},\hat{m}, \hat{n}\) fo arm mutually orthogonal right handed system. In fact \begin{equation} \hat{\ell}\times\hat{m}=\hat{n};\quad \hat{m}\times\hat{n}=\hat{\ell};\quad \hat{n}\times \hat{\ell}=\hat{m}. \end{equation}
Please verify the above equations.
We resolve the vector \(\overrightarrow{NQ}\) as a sum of unit vectors \(\hat{\ell}, \hat{m}\). Now \(\angle QNP\) is equal to the angle of rotation \(\theta\). Hence \begin{eqnarray}\nonumber \overrightarrow{NQ} &=& NQ \cos\theta\, \hat{m} + NQ \sin \theta\, \hat{\ell}\\\nonumber &=& NP \cos\theta\, \hat{m} + NR \sin \theta\, \hat{\ell}\\ &=& \overrightarrow{NP}\, \cos\theta + \overrightarrow{NR}\, \sin\theta \label{EQ10} \end{eqnarray} Next we express the vectors \(\overrightarrow{NP}\) and \(\overrightarrow{NR}\) in terms of cross products of \(\hat{n}\) and \(\vec{r}\). We have \begin{eqnarray}\label{EQ11} \hat{\ell} = \hat{m}\times \hat{n} \Longrightarrow \frac{\overrightarrow{NR}}{NR}= \frac{\overrightarrow{NP}}{NP}\times\hat{n} \end{eqnarray} Since \(NP=NR\), we get \begin{eqnarray}\label{EQ12} \overrightarrow{NR} = \overrightarrow{NP}\times\hat{n} = (\hat{n}\times \vec{r})\times \hat{n}=-\hat{n}\times(\hat{n}\times\vec{r}). \end{eqnarray} Similarly, \begin{eqnarray}\nonumber \overrightarrow{NP} &=& NP (\hat{m})= NP (\hat{n}\times \hat{\ell}) = NR (\hat{n}\times \hat{\ell}) = (\hat{n}\times \overrightarrow{NR})\\\nonumber &=&\hat{n}\times( \hat{n}\times (\hat{n}\times\vec{r})) =\hat{n}\times[ \hat{n} (\hat{n}\cdot\vec{r}) -\vec{r} ]\\ &=&- (\hat{n} \times \vec{r}).\label{EQ13} \end{eqnarray} Substituting \eqRef{EQ12} and \eqRef{EQ13} in \EqRef{EQ10}, we get \begin{equation} \overrightarrow{NQ} = - \hat{n}\times(\hat{n}\times\vec{r})\, \cos\theta - (\hat{n} \times \vec{r}) \sin \theta. \end{equation} The above result, when used in \eqRef{EQ03}, gives \begin{eqnarray} \vec{r}{'} = (\hat{n}\cdot \vec{r}) \hat{n} -(\hat{n}\times \vec{r}) \sin\theta - \hat{n}\times(\hat{n}\times \vec{r})\cos\theta.\label{EQ15} \end{eqnarray} Making use of \[ (\hat{n}\cdot \vec{r}) \hat{n} = \hat{n}\times(\hat{n}\times \vec{r}) +\vec{r},\] \eqRef{EQ15} can be rearranged to give the following alternate form \begin{eqnarray} \vec{r}{'} = \hat{r} -(\hat{n}\times \vec{r}) \sin\theta + \hat{n}\times(\hat{n}\times \vec{r})(1-\cos\theta) . \end{eqnarray} Thus a vector \(\vec{A}\), under rotation by an angle \(\theta\), coincides with a vector \(\vec{A}{'}\) given by \begin{equation} \boxed{ \vec{A}{'} = \hat{r} -(\hat{n}\times \vec{A}) \sin\theta + \hat{n}\times(\hat{n}\times \vec{A})(1-\cos\theta)} \end{equation}
Exclude node summary :
Exclude node links:
4727:Diamond Point
