




 ||Message]
||Message]
1. Displacements of a rigid body
A rigid body may be thought of as consisting of several particles such that the distances between every pair of particles is constant.
Translation The translation by a vector \(\mathbf a\), of a rigid body, is a displacement such that difference in position vectors of a point of the rigid body before and after rotation, \( \mathbf R_\alpha\) \( \mathbf R_\alpha^{'} \), is same for all points \((\alpha=A,B,C,...)\) of the rigid body. \[ \mathbf R{'}_\alpha - \mathbf R_\alpha = \mathbf a.\] ![]()
Rotation about a point When a rigid body moves with a point of the body fixed, we call this displacement as {\it rotation about a point} \(O\). Under rotation the position vector, \(\mathbf x_\alpha\), of every point \((\alpha=A,B,C...)\) rotates by the same amount about the point \(O\).
Rotation about a line A rotation about line \(L\) is a displacement such that the points on the line do not move; their positions before and after displacement are same.
Euler's Theorem Euler's theorem states that a rotation about a point \(O\) is always equivalent to a rotation about a line through the point \(O\). Whittakar\cite{Whitta}
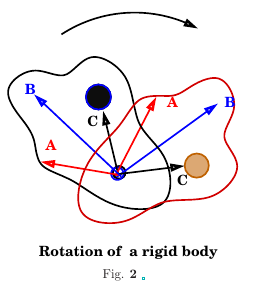
General displacement A rigid body can always be brought from a configuration I to configuration II by a translation and rotation about a point in the body. So for example, we can choose a point \(C\) of the rigid body and translate the body so that the chosen point \(C_1\) in configuration I moves to the position of the point \(C\) in configuration II. A general point \(P_1\) in configurations I moves to position \(P_2\) in configuration II and then to final position \(P_3\) in configuration III. If the points \(P_1, P_3\) have positions \(\mathbf x_1, \mathbf x_2, \mathbf x_3\) in the three configurations, the translation is to be carried out by \(\mathbf a = \mathbf x_2 - \mathbf x_1\). The point \(C\) can be chosen to be any point of the rigid body.
![]()
Definition of position vector relative to space and body fixed points (Choice of Coordinates)We now choose a point \(O\) as the origin and a set of axes \({\mathscr K}\) fixed in space. At any give time \(t\), the position \(\mathbf R (\equiv \overrightarrow{OP})\) of a point \(P\) in the body, relative to a point \(O\), can be written as a sum \begin{equation} \mathbf R = \mathbf a + \mathbf r \end{equation} where \(\mathbf a (\equiv \overrightarrow{OA})\) is the position vector of a chosen point \(A\) relative to \({\mathscr K}\). The vector \(\mathbf r (\equiv \overrightarrow{AP})\) is the position of a point \(P\) relative to the point \(A\) in the rigid body.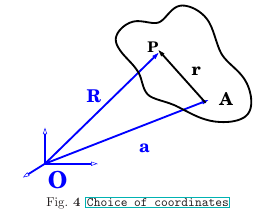
2. Angular velocity of a rigid body
When a rigid body is moving continuously, for its configurations at time \(t\) and at time \(t+\Delta\) the positions of point \(P\) are \begin{eqnarray} \mathbf R(t) &=& \mathbf a(t) + \mathbf r(t)\\ \mathbf R(t+\Delta t) &=& \mathbf a(t +\Delta t) + \mathbf r(t+\Delta t) \end{eqnarray} Therefore velocity of point \(P\) relative to the space fixed axes can be written as \begin{eqnarray} \mathbf V &=& \lim_{\Delta t \to 0}\frac{\mathbf R(t+\Delta t)-\mathbf R(t)}{\Delta t}\\ &=& \lim_{\Delta t \to 0}\frac{\mathbf a(t+\Delta t)-\mathbf a(t)}{\Delta t} + \lim_{\Delta t \to 0}\frac{\mathbf r(t+\Delta t)-\mathbf r(t)}{\Delta t} \end{eqnarray} The position vectors, of the point \(P\), at different times relative to the point \(A\) will be related by a rotation about \(A\). For infinitesimal rotation, we have \begin{equation} \mathbf r(t+\Delta t)-\mathbf r(t) = (\mathbf n\times \mathbf r) \Delta \theta. \end{equation} Hence \begin{eqnarray} \lim_{\Delta t \to 0}\frac{\mathbf r(t+\Delta t)-\mathbf r(t)}{\Delta t} = {\pmb {\omega}} \times \mathbf r. \end{eqnarray} where \(\pmb{\omega} = \mathbf n \big(\dd[\theta]{t}\bf)\). Here \(\pmb{\omega}\) is the angular velocity of the body fixed axes, with origin at point \(A\), w.r.t the space fixed axes. Thus we get \begin{equation} \dd[V]{t} =\mathbf V_a+ \pmb{\omega}\times {\mathbf r} \end{equation} where \(\mathbf V_0\) is the velocity of the the point \(A\).\par It can be proved that the \(\pmb{\omega}\) appearing in the above expression is independent of choice of reference point \(A\), and hence it qualifies to be called as the angular velocity of the rigid body w.r.t. the space axes. Landau Lifshitz \cite{Landau-ME}
Exclude node summary :
Exclude node links:
4727:Diamond Point
