




 ||Message]
||Message]
Contents
Let \(K\) be a set of chosen coordinate axis. Let \(\vec{x}\) denote the position vector of a point \(P\). Let the components of the position vector be \(\vec{x}=(x_1,x_2,x_3)\). Under a rotation the point \(P\) moves to a new position \(Q\). Let vector \(\vec{x}{'}\) the position vector of point \(Q\). The vector \(\vec{x}{'}\) obtained from the vector \(\vec{x}\) by rotating it by an angle \(\theta\) about about an axis along a unit vector \(\hat{n}\). The rotation of the vector is performed clockwise when looking from tip of vector \(\hat{n}\) along the axis towards the origin. We resolve the vector \(\vec{x}\) as a sum of two vectors, one parallel to \(\hat{n}\) and the other perpendicular to \(\hat{n}\). Thus we write \begin{equation} \vec{x} = a \hat{n} + \vec{x}_\perp \end{equation} Taking scalar product with \(\hat{n}\) gives \(a=\hat{n}\cdot\vec{x}\). Thus we have \begin{eqnarray} \vec{x} &=& (\hat{n}\cdot\vec{x})\, \hat{n} + \vec{x}_\perp\\ \therefore \vec{x}_\perp &=& \vec{x} - (\hat{n}\cdot\vec{x})\, \hat{n}\label{EQ03} = - \hat{n}\times(\hat{n}\times\vec{x}) \end{eqnarray} Similarly, we will have \begin{eqnarray} \vec{x}{'} &=& b \hat{n} + \vec{x}{'}_\perp= (\hat{n}\cdot\vec{x}{'}) \hat{n}+\vec{x}{'}_\perp \\ \text{and } \vec{x}{'}_\perp &=& \vec{x}{'} - (\hat{n}\cdot\vec{x}{'})\, \hat{n} = - \hat{n}\times(\hat{n}\times\vec{x}{'}) \end{eqnarray} Under a rotation the component of a vector along the axis of rotation does not change. Hence \(a=b\) and therefore \(\hat{n}\cdot\vec{x}{'} = \hat{n}\cdot\vec{x}\). Thus we can write \begin{eqnarray}\label{EQ07} \vec{x}{'} &=& (\hat{n}\cdot\vec{x})\, \hat{n} + \vec{x}{'}_\perp\\ \vec{x}_\perp{'} &=& - \hat{n}\times(\hat{n}\times\vec{x}{'}) \end{eqnarray} We need to determine \(\vec{x}{'}_\perp\) in terms of \(\hat{n}\) and \(\vec{x}\). As already noted the parallel component of vector \(\vec{x}\), does not change under a rotation. The perpendicular part \(\vec{x}_\perp\equiv \overrightarrow{NP}\) becomes the perpendicular part \(\overrightarrow{NQ}\equiv\vec{x}_\perp{'}\) of the new position vector \(\vec{x}{'}\). Thus the angle between the vectors \(\overrightarrow{NP}\) and \(\overrightarrow{NQ}\) is just the angle of rotation \(\theta\). See diagram below.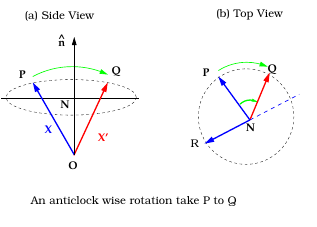
In the diagram the plane containing the vectors \(\overrightarrow{NP}\) and \(\overrightarrow{NQ}\) is a plane perpendicular to vector \(\hat{n}\) specifying the axis of rotation. Since the vector \(\overrightarrow{NP}\) is perpendicular to unit vector \(\hat{n}\), the cross product \(\hat{n}\times \overrightarrow{NP}\) has the same magnitude as \(\overrightarrow{NP}\) also lies in the plane perpendicular to \(\hat{n}\). This cross product is represented as vector \(\overrightarrow{NR}\) in the above diagram and we have \begin{eqnarray} \overrightarrow{NR} &=& \hat{n}\times \overrightarrow{NP} = \hat{n}\times\vec{x}_\perp\\ &=& \hat{n}\times (\vec{x} - \hat{n}(\hat{n}\cdot \vec{x}))\\ &=&\hat{n}\times \vec{x} \end{eqnarray} To summarize we have
- The three vectors \(\overrightarrow{NP},\overrightarrow{NQ},\overrightarrow{NR}\) have equal lengths, {\it i.e.} \(NP=NQ=NR\).
- The angle between vectors \(\overrightarrow{NP},\overrightarrow{NQ}\) is the angle of rotation \(\theta\).
- The vector \(\overrightarrow{NR} \) is perpendicular to \(\overrightarrow{NP}\) as shown in the figure above.
We now want to resolve the vector \(\overrightarrow{NQ}=\vec{x}{'}_\perp\) along mutually perpendicular directions \(\overrightarrow{NP}\) and \(\overrightarrow{NR}\). For this purpose cconsider
Resolution of a vector
Let \(\hat{u},\hat{v}\) be two perpendicular unit vectors and let \(\vec{A}\) be any vector. Components of \(\vec{A}\) along \(\hat{u},\hat{v}\) are \(A\cos\theta, A\sin\theta\), where \(\theta\) is the angle vector \(\vec{A}\) makes with \(\hat{u}\) repectively. We can then write \[\vec{A} = A \cos\alpha \hat{u} + A \sin \theta \hat{v}.\] We apply this in the present case after identifying \[\overrightarrow{NQ} \to\vec{A} ; \quad \frac{\overrightarrow{NP}}{NP} \to \hat{u} ;\quad \frac{\overrightarrow{NR}}{NR}\to -
\hat{v} \] 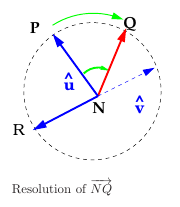
Resolution of $\overrightarrow{NQ}$
Remembering that \(NP=NQ=NR\), it should now be obvious that \begin{eqnarray} \overrightarrow{NQ} &=& \big(NQ\,\cos\theta\big)\, \left(\frac{\overrightarrow{NP}}{NP}\right) - \big(NQ\,\sin \theta\big)\,\left( \frac{\overrightarrow{NR}}{NR}\right) \\ &=& \cos\theta\, \overrightarrow{NP} - \sin \theta\, \overrightarrow{NR}\\ \therefore\quad \vec{x}{'}_\perp &=& -\cos\theta \, (\hat{n}\times(\hat{n}\times\vec{x})) -\sin\theta\, (\hat{n}\times\vec{x}). \end{eqnarray} Substituting in \eqRef{EQ07}, we are lead to the desired result \begin{equation}\label{EQ14} \vec{x}{'} = (\vec{x}\cdot\hat{n})\hat{n} - (\hat{n}\times\vec{x})\sin\theta - \hat{n}\times(\hat{n}\times\vec{x})\cos\theta. \end{equation} This formula can also be written in an alternate form as \begin{equation}\label{EQ15} \vec{x}{'} = \vec{x} - (\hat{n}\times\vec{x}) \sin\theta + \hat{n}\times(\hat{n}\times\vec{x}) (1-\cos\theta). \end{equation} We have used \((\vec{x}\cdot\hat{n})\hat{n}= \hat{x} +\hat{n}\times(\hat{n}\times\vec{x})\), see \eqRef{EQ03}. The formula \EqRef{EQ14} appears without a proof in [??]
Exclude node summary :
Exclude node links:
4727:Diamond Point
